Touch perception
As humans, we interact with the environment via our senses (sight, hearing, smell, taste, and touch). Touch perception has been in the attention of scientist for decades, with applications in the textile, robotics, or sports industries. The objective of studying touch perception can be to give a certain property such as gripping, stickiness or smoothness to a material (known as texture design), to mimic the sensations when touching a surface in robotic implants, or it can be simply to predict how a surface will be perceived by a subject.
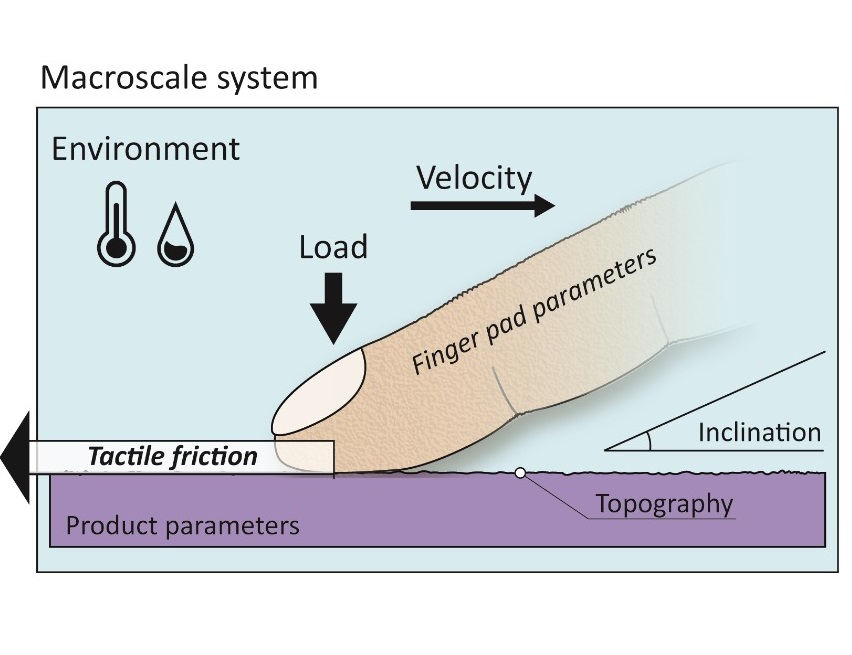
We characterize the properties of a surface by touching it. The relative motion between the fingertip and the surface results in mechanical actions that activate mechanoreceptors (somatosensory receptors that respond to a mechanical stimulus) located in one of the skin’s layers. The mechanoreceptors send information to the brain, which in return gives a feedback about the perceived surface. However, the perception of surfaces depends on various factors at multiple length scales. In turn, these factors depend on the characteristics of the fingertip (such as elastic properties of the skin, fingerprints, skin lubrication, etc.), the surface (topography, morphology, elastic deformations, lubrication, etc.) and the environment (temperature, humidity, etc.). The variety of factors affecting touch perception makes it difficult, if not impossible, to compare absolute friction values between studies or to validate different texture designs. A recent study by D.A. Sergachev D.T.A. Matthews, and E.van der Heide aimed at normalising tactile friction. The study considered factors at 3 length scales: macro, meso and micro. The macro scale referred to the gross contact area (or apparent contact area), which depends on the size of the fingertip, the angle at which the fingertip touches the surface, and the elastic modulus of the skin. The meso scale referred to the contact area created by the deformation of the fingertip ridges also known as fingerprint contact area. The micro scale or real contact area considers the asperities of a surface. In this study the micro scale referred to the different characteristics (textures) of the tested surfaces.

The authors investigated whether, by normalising friction data, it is possible to compare tactile friction between subjects. The approach was designed to “normalise finger–pad friction measurements with the intention of analysing mechanistic factors in comparative studies of tactile friction.”
The study consisted of in-vivo friction measurements with 10 participants and 4 surface samples (three textured and one non-textured reference). Friction measurements were performed with a customised equipment for finger–pad sliding tests. The friction force measured with a flat sample (the control reference) was used for normalisation. The authors started from three assumptions:
- the fingerprint contact area does not change during tests for a given participant,
- at all normal loads, the real contact area for the reference sample is similar to the ridge contact area,
- friction force is purely based on adhesion.
The authors concluded that “Normalisation of the frictional data allows to reduce one of the unknown personal variables: function of the ridge contact area, reduced Young’s modulus or interfacial shear strength.” They also observed that, although there are differences in skin properties, the participants showed similar fractions of real contact area.

Research in this area could benefit from using a larger number of participants. It would be interesting to consider also a subjective evaluation of the tested samples by the participant. Analysis between data obtained in this study and the Stribeck curve could give further insights into the phenomena that govern touch perception.
For more information: “Normalising tactile friction”, D.A. Sergachev D.T.A. Matthews, and E.van der Heide, https://doi.org/10.1016/j.triboint.2021.107052
Leave a Reply
You must be logged in to post a comment.
Greetings..!!
Tactile friction may be viable for human perception in defeating nature forces. Stick-slip friction is in general present at external TRIBO interface for rationalization of materials-energy balance. Nature consciousness from environmental third bodies regulates friction at sliding and sticking interfaces. Real area of contact, elasticity, hydration lubrication, diversity, and environmental factor may be dependent indicators for assessment of tactile friction. Kind regards!
Dr. Pankaj TOMAR