I am currently working as a Postgraduate Researcher at the University of Leeds, where I am actively involved in research activities. Prior to this, I successfully completed my master's degree through the renowned Erasmus Mundus joint program, specializing in Tribology and Bachelor's degree in Mechanical Engineering from VTU in Belgaum, India. Further I handle the social media pages for Tribonet and I have my youtube channel Tribo Geek.
Atomic force microscopy
28.09.2022
Table of Contents
Introduction
The microscopic technology which is used to observe and measure the surface topography of the materials with greater resolution and accuracy is Atomic force microscopy (AFM). The major limitations of the Scanning tunneling microscope (STM) of requiring conductive samples for surface characterization are fulfilled by the AFM technology. The AFM acts as a synthesis of the optical profilometer and STM for surface characterization. The first publication on the atomic resolution of graphite was published by Binning and coworkers [1]. The application of AFM can be implemented in any sample which is hard or soft; the hard samples such as ceramics or metallic nanoparticles etc. soft samples such as flexible polymers, human cells, etc. Also, the AFM technology is implemented in most of the research areas which include physics, chemistry, biology, nanotechnology, material science, medicine, astronomy, etc.
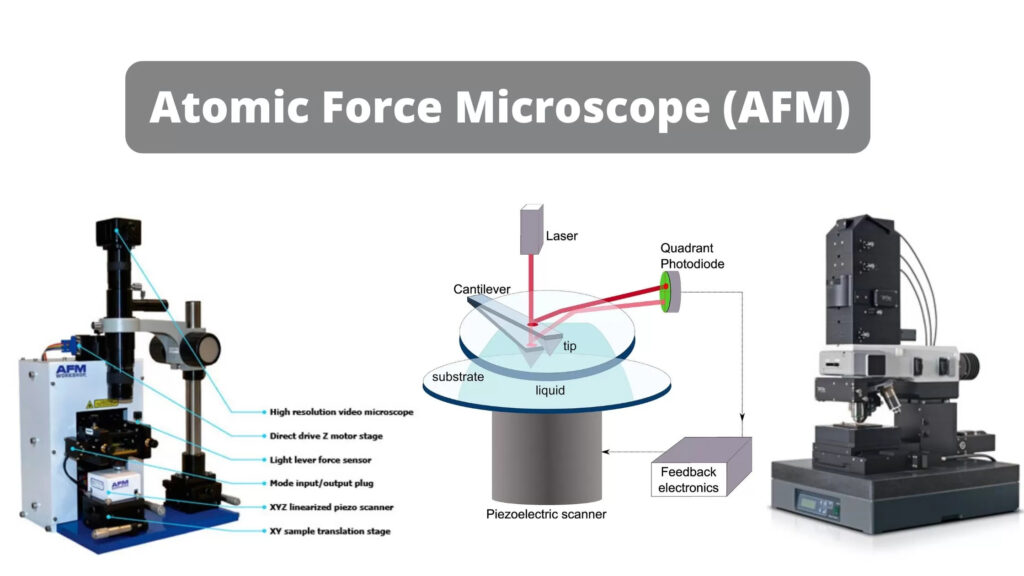
Fig-1 The Atomic force microscopy machine [2].
Basic components:
The three basic components of the AFM are the transducer, force sensor, and feed-back system [4]. These are the most important components that constitute the AFM and the schematic representation of the AFM along with its components are shown in Fig-2.

Fig-2 The basic components of AFM [3].
- Transducer: The mechanical motion of the cantilever in the AFM is created from the electrical energy using an electromechanical transducer. The most commonly used electromechanical transducer in the AFM is the piezoelectric ceramic transducer. Piezoelectric material is one of the interesting materials which undergoes a change in its geometry when it is placed in an electric field. The measurements in the AFM depend on the amount of motion and its direction which in turn depends on the piezoelectric materials shape and field strength.
- Force sensor: The force between the probe (cantilever) and the examining surface should be measured force sensor. The common type of force sensor uses Hooke’s law to measure the force between the cantilever and the applied pressure. The motion of the cantilever can be done using the light lever method; which uses the light to reflect on the backside of the cantilever to the photodetector and measures the motion.
- Feedback control: Feedback control is very important in the AFM which is used to keep the motion of the object to a reference object. In AFM, the feedback controls the motion of the probe to be in relationship to the measuring surface.
Working Principle:
The basic principle of the AFM with the optical feedback uses the AFM probe with a sharp cantilever tip over the surface of the sample. The Cantilever tip is usually made up of silicon nitride which is a flexible and free end. The piezoelectric ceramic scanner helps in controlling the position of the AFM probe in both vertical and lateral directions. The cantilever tip moves over the surface measuring the different heights deflecting over the surface. The deflection is measured by the laser beam on the backside of the cantilever tip which is directed towards the position detector. The feedback loop controls the scanner at the vertical extension to maintain the constant cantilever deflection with constant interaction force. The coordinates that are measured by the cantilever tip is used to generate the 3D topographical image of the surface. The working principle of the AFM is shown in the Fig-3.

Fig-3 The working principle of AFM [5].
Working Modes:
There are basically two modes of working which includes static and dynamic modes, they can also be named the contact and noncontact modes. In the case of the dynamic or noncontact mode, it is further categorized as tapping/intermittent contact and non-contact modes depending on the interaction forces between the tip and the surface. The working modes of the AFM are shown in Fig-4.
- Static or Contact mode: In the case of the contact mode the cantilever tip makes the contact with the measuring surface and the feedback system helps to maintain the constant deflection and interaction force at the AFM tip. The forces between the tip and the surface are repulsive and the tip of the AFM cantilever is made of soft materials in order to avoid wear at the tip and to increase the sensitivity.
- Dynamic mode: In dynamic mode, there are two types which are tapping mode and noncontact mode.
- Tapping mode: In the case of tapping mode the cantilever tip oscillates by piezoelectric actuator at its fundamental resonance frequency and the tip is slightly lowered at the measuring surface to make contact on the surface thus tapping on the surface. The feedback loop maintains the constant interaction at the surface.
- Non-contact mode: In this case of non-contacting mode the cantilever tip oscillates near to the resonance frequency with a smaller amplitude than the tapping mode. The tip is maintained at a distance of manometers to the measuring surface in the region of the attractive interaction forces. The feedback loop maintains constant AFM oscillation frequency so the constant interaction forces.


Fig-4 The working modes of AFM a) Static mode b) dynamic mode [6].
Research on AFM:
The advancement in the topographical analysis of any material surface is achieved using the AFM technology. There are various research performed using the AFM technology for analyzing the different materials ranging from nano to micrometers. The AFM technology was used by researchers to analyze the carbon nanotubes which helped in understanding the structural properties of the carbon nanotubes [7]. Shaoyang Liu et.al. studied the review on AFM application in the field of microbiology where they discussed the various research on morphological characteristics of microbes and the use of force-distance curves to understand the interaction of the microbial samples at the nanometer and cellular levels [8].
References:
[1] Binnig, C.F. Q tua e and C. Gerber, Phys. Rev. Lett. 56, 930 (1986)
[2] https://microbiologynote.com/atomic-force-microscope-afm-definition-principle-application/
[3] https://en.wikipedia.org/wiki/Atomic_force_microscopy
[4] https://www.azom.com/article.aspx?ArticleID=3250
[6] Nalwa, H.S. ed., 2001. Handbook of surfaces and interfaces of materials, five-volume set. Elsevier.
[8] Liu, S. and Wang, Y., 2010. Application of AFM in microbiology: a review. Scanning, 32(2), pp.61-73.
Be the first to comment