Administration of the project
Greenwood and Williamson Contact Model
04.01.2017
Surface roughness was recognized to play a major role in forming friction and transition from one lubrication regime to another [1]. Greenwood pioneered with first rough contact model in 1966 [2]. Inspired by this milestone work a branch of dry contact models was born. With time, a substantial number of models is constructed to overcome certain assumptions employed in the initially developed theory, however, due to its analytical nature Greenwood’s model is still being used in estimation of friction coefficient and wear [3,4].

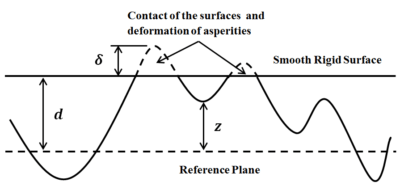
The contact between a smooth rigid plane and rough elastic surface is considered as shown in Figure 1. The rough surface is represented as a set of independent asperities with spherical tips of constant radius of curvature β. Hence, for each asperity, Hertz theory is applicable [5]. It was assumed by Greenwood, that the asperities heights varied randomly with a certain probability distribution , for example Gaussian and in that case is represented as:

where  is the standard deviation of the asperity peaks. If the distance between two surfaces is
is the standard deviation of the asperity peaks. If the distance between two surfaces is  , then the probability of the contact for an asperity with height is given by:
, then the probability of the contact for an asperity with height is given by:


and the number of asperities N is assumed to be large enough to calculate the expected number of contacts according to

According to Hertz theory (Hertz model), the area of contact for the asperity with height z equals to  and therefore the expected total area of contact is
and therefore the expected total area of contact is

Similarly, using Hertz theory one can obtain the expected total load:


where  .
.  and
and  are the elastic moduli and Poisson’s ratio of bodies 1 and 2 correspondingly.
are the elastic moduli and Poisson’s ratio of bodies 1 and 2 correspondingly.
Despite the fact that this model is widely accepted and used by the researchers, a large number of algorithms were developed to shorten the list of assumptions. One of such models was developed by Faraon [6]. In his method, instead of using statistical representation of the surface asperities, deterministic approach was used. It means that each asperity has its own radius of curvature  and height
and height  . Therefore, for each asperity, the area of contact
. Therefore, for each asperity, the area of contact  and carried load
and carried load  can be obtained using Hertz theory:
can be obtained using Hertz theory:
 ,
, 
The total load and total area of contact then is simply the sum of local N components:
 ,
, 
References
- [1] Zhu D. On the Lambda Ratio Range of Mixed Lubrication. Proceedings of the Institution of Mechanical Engineers, Part J: Journal of Engineering Tribology. 2012;226:1010-22.
- [2] Greenwood J, A., Williamson, G.,P.,B. Contact of Nominally Flat Surfaces. 1966;295.
- [3] Andersson S, Olofsson U. Simulation of Plastic Deformation and Wear of a Rough Surface Rubbing Against a Smooth Wear Resistant Surface. Rotrib, 10-th International Conference on Tribology. Bukharest2007.
- [4] Faraon IC, Schipper DJ. Stribeck Curve for Starved Line Contacts. Journal of Tribology. 2007;129:181-7.
- [5] Johnson KL. Contact Mechanics. Cambridge: Cambridge University Press; 1985.
- [6] Faraon IC. Mixed lubricated line conacts. PhD thesis.: University of Twente; 2005.
Be the first to comment