Administration of the project
Rigid Cone on Elastic Flat: Online Calculator
27.05.2021
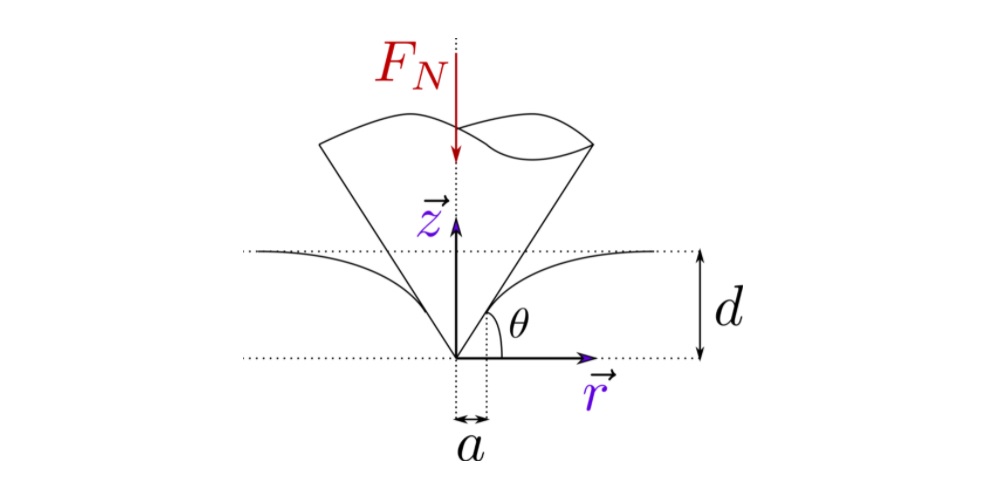
Conical Indenter
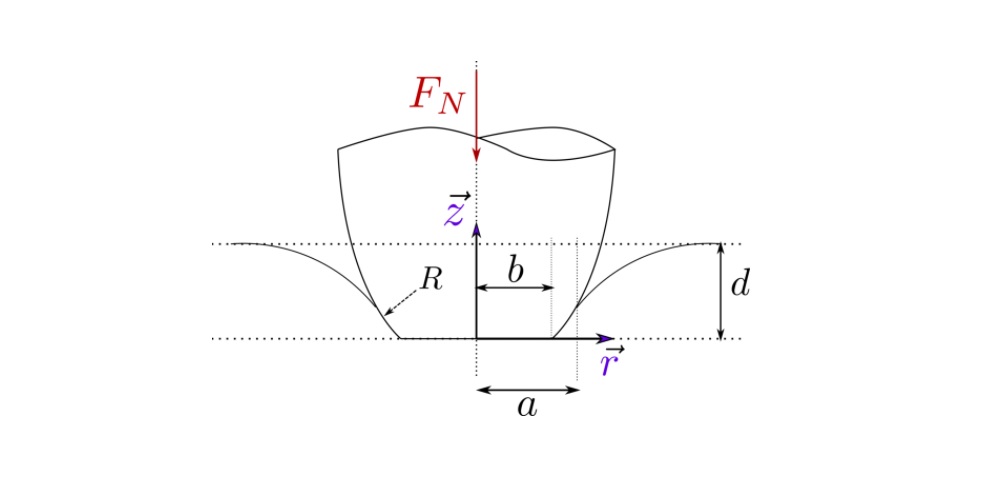
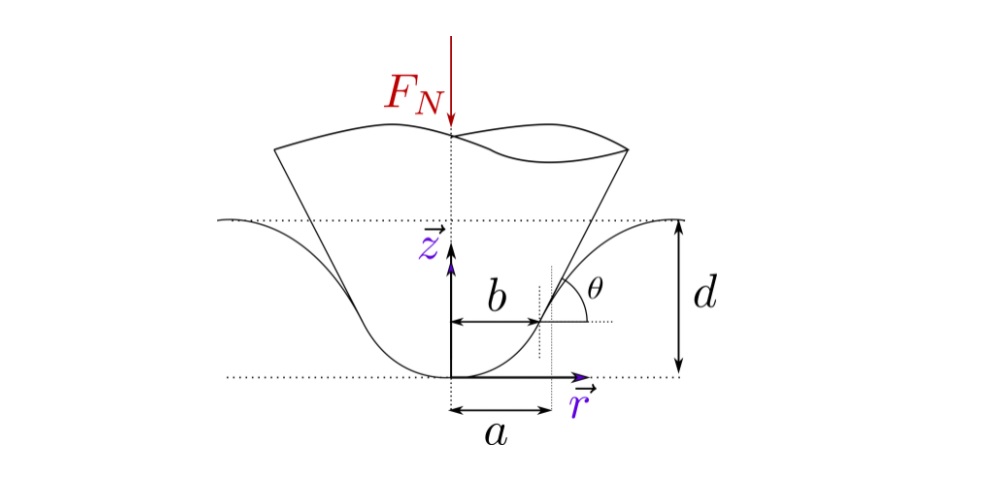
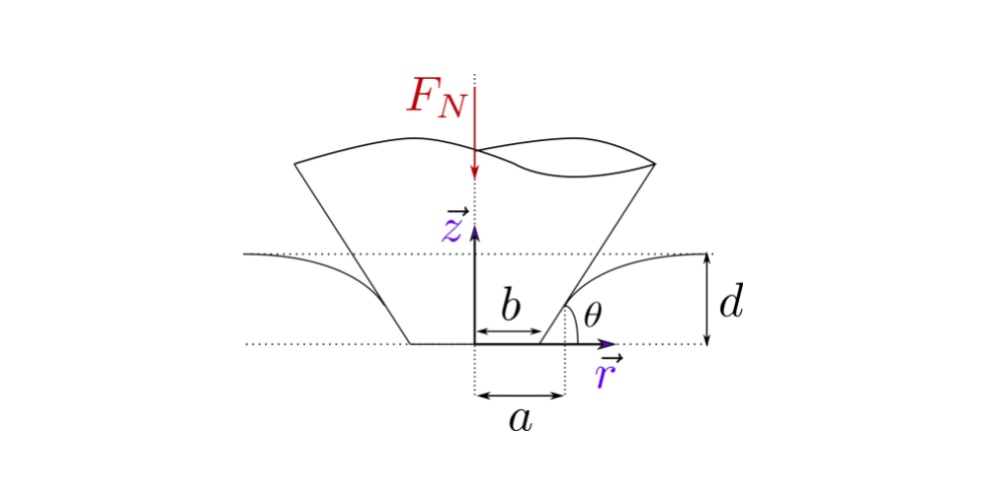
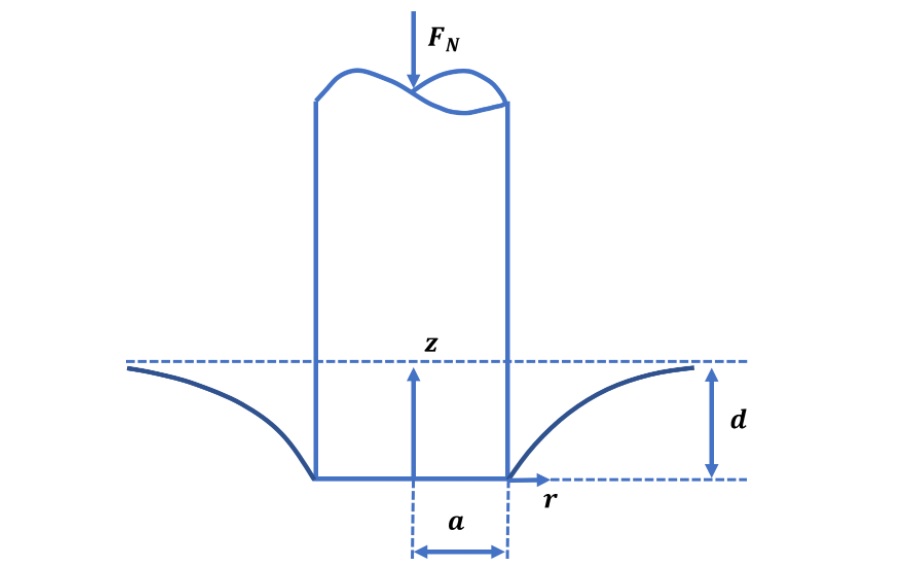
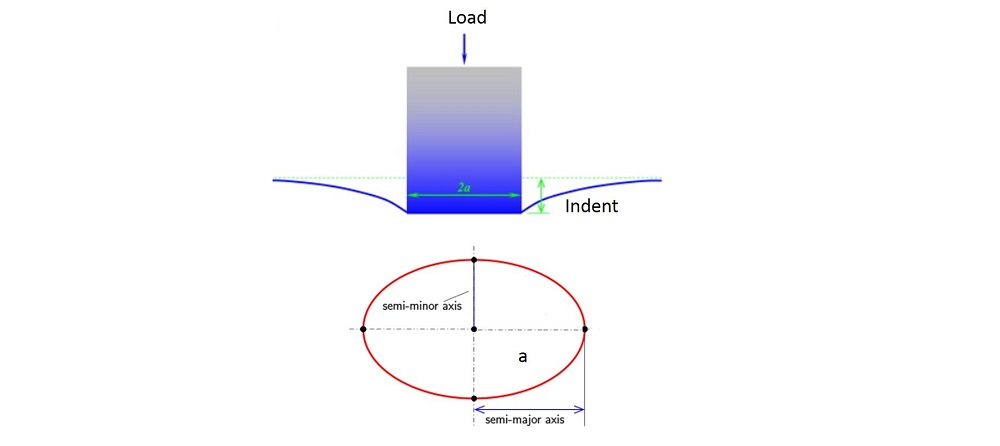
The conical intender is characterized by its inclination angle  . After applying a rigid body motion
. After applying a rigid body motion  (resulting in normal load
(resulting in normal load  ) on an elastic substrate, the intender deforms the substrate and creates elastic deformation and effective contact radius
) on an elastic substrate, the intender deforms the substrate and creates elastic deformation and effective contact radius  as shown in the figure.
as shown in the figure.
Displacement depth , inclination angle and contact radius are all related to other geometrically. The contact radius can be calculated using the relation:
(1) 
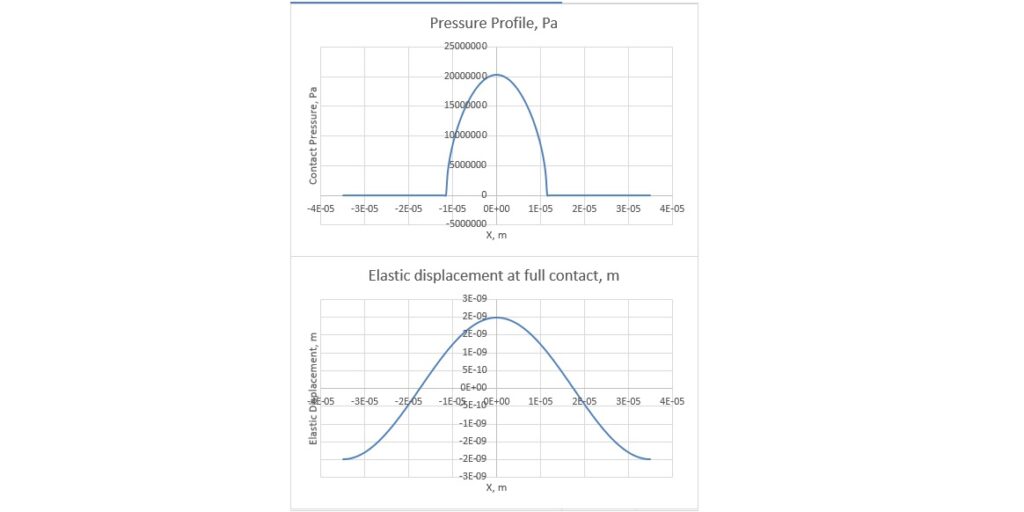
The profile of the stress  and the displacement
and the displacement  are determined by the formulas below ([1]):
are determined by the formulas below ([1]):
(2) ![\begin{align*} \sigma_{zz}(r;a) &= -p_0 \arccosh\left(\frac{a}{r}\right), \hspace{1cm} r\leq a\\ \omega(r;a) &= a \tan(\theta)\left[ \arcsin \left(\frac{a}{r} + \frac{\sqrt{r^2-a^2} -r}{a} \right)\right], \hspace{1cm} r > a \end{align*}](https://quicklatex.com/cache3/f9/ql_991ca6c52ea4602fa55cb292875191f9_l3.png "Rendered by QuickLaTeX.com")
where  is the average pressure which is given by the equation:
is the average pressure which is given by the equation:
(3) 
while  is the elasticity of the substrate or the conical intender as well.
is the elasticity of the substrate or the conical intender as well.
These formulas are restricted to relatively small values.
Definitions:
Poisson’s ratio of the substrate  dimensionless,
dimensionless,
Young’s modulus of elasticity  of the substrate, [Pa],
of the substrate, [Pa],
Equivalent elastic constant  , [Pa],
, [Pa],
Normal load , [N]